OpenCV颜色识别 物体追踪
对于颜色识别和imutils包的用法请浏览我得另一篇博客:OpenCV学习笔记
代码原理
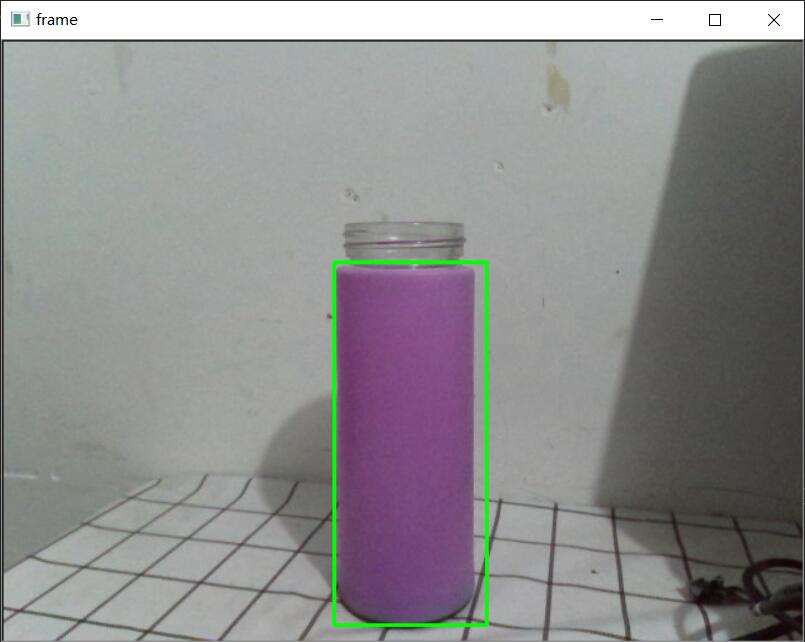
这是个比较简单的代码。代码实现的就是简单的物体追踪,将物体用方框框出。
简单来讲就是先进行颜色识别,正确识别到物体后获取物体的外接矩形再画出外接矩形即可。
详细的解释可以看代码注释,应该是容易理解的。
代码
import cv2
import numpy as np
import imutils
from imutils import contours
# 颜色阈值
lower = np.array([130, 62, 72])
upper = np.array([170, 255, 148])
# 内核
kernel = np.ones((5, 5), np.uint8)
# 打开摄像头
vc = cv2.VideoCapture(0)
if vc.isOpened():
flag, frame = vc.read()
# 翻转图像
# 这一步可以忽略,博主的摄像头是反着的
# 所以加上这句话可以让摄像头的图像正过来
frame = imutils.rotate(frame, 180)
cv2.imshow("frame", frame)
else:
flag = False
while flag:
flag, frame = vc.read()
# 翻转图像
frame = imutils.rotate(frame, 180)
draw_frame = frame.copy()
if frame is None:
break
if flag is True:
'''下面对摄像头读取到的图像进行处理,这个步骤是比较重要的'''
# 转换颜色空间HSV
frame_hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 颜色识别
img = cv2.inRange(frame_hsv, lower, upper)
# 膨胀操作
dilation = cv2.dilate(img, kernel, iterations=1)
# 闭操作
closing = cv2.morphologyEx(dilation, cv2.MORPH_CLOSE, kernel)
# 高斯滤波
closing = cv2.GaussianBlur(closing, (5, 5), 0)
# 边缘检测
edges = cv2.Canny(closing, 10, 20)
'''上面进行那么多操作就是为了得到更好的目标图形,具体效果因环境而异'''
# 寻找轮廓
cnts, _ = cv2.findContours(
edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
# 判断轮廓数量也就是判断是否寻找到轮廓,如果没有找到轮廓就不继续进行操作
if len(cnts) > 0:
# 存放轮廓面积的列表
s = []
# 存放最大轮廓的索引
max_index = 0
# 获得排序后的轮廓列表以及每个轮廓对应的外接矩形
(cnts, boundingRects) = contours.sort_contours(cnts)
# 寻找面积最大的轮廓的索引
for cnt in cnts:
s.append(cv2.contourArea(cnt))
max_index = s.index(max(s))
# 根据面积最大轮廓的索引找到它的外接矩形的信息
(x, y, w, h) = boundingRects[max_index]
# 画矩形
frame_out = cv2.rectangle(
draw_frame, (x, y), (x+w, y+h), (0, 255, 0), 2)
cv2.imshow("frame", draw_frame)
if cv2.waitKey(10) == 27:
break
vc.release()
cv2.destroyAllWindows()具体解释都在代码注释里面了,下面我要提一些注意的地方。
- 获得过图像之后可能需要进行一系列的形态学操作,这样可以让获得的图像更加接近目的图像。这些操作虽然不是必需的但如果正常取得的图像效果不好的时候可以加上。
- 函数
contours.sort_contours和imutils.rotate是imutils包里面的,使用起来比较方便,具体用法可以看博主的另一篇博客:OpenCV学习笔记。外接矩形也可以通过cv2.boundingRect函数获得。 - 代码中博主是以轮廓的最大面积为条件画的图,但这个条件应该根据自己想要的效果而定。这里除了寻找最大面积以外还可以寻找最大周长、最长的边之类的。
最终效果图