PX4飞控-uORB主题的发布与订阅
一、添加msg文件
在源代码目录/msg文件夹下新建一个.msg文件。文件内容如下。
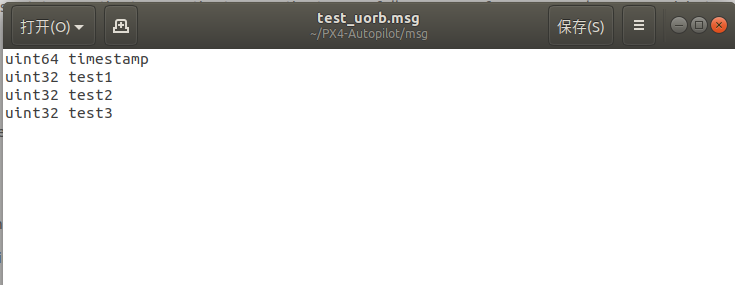
其中test1、test2、test3均为自定义的变量。timestamp为时间戳。
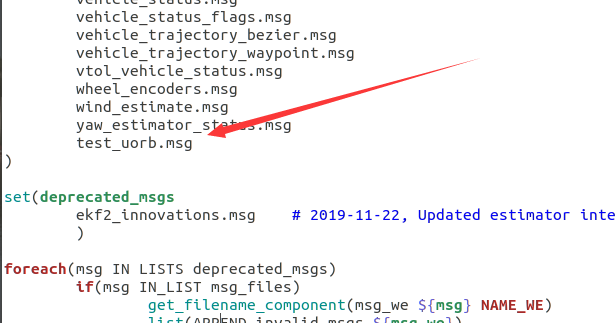
二、 修改CMakeLists.txt文件
在同目录下找到CMakeLists.txt文件,打开后添加刚才定义的.msg文件。
三、 编译源代码
编译完源代码后,进入源代码目录/build/px4_fmu-v2_default/uORB/topics文件夹,找到与之前新建的.msg文件同名的.h文件。在我这里即为test_uorb.h文件。
可以打开这个文件查看内容。
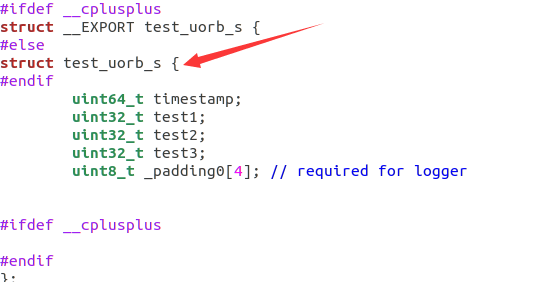
里面有一个test_uorb_s的结构体,这个结构体里面包含之前定义的几个变量。
四、编写发布文件
.c文件编写:
/**
* @file px4_uorb_adver_app.c
*/
#include <stdio.h>
#include <termios.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
#include <stdbool.h>
#include <errno.h>
#include <drivers/drv_hrt.h>
#include <systemlib/err.h>
#include <fcntl.h>
#include <systemlib/mavlink_log.h>
#include <uORB/uORB.h>
#include <uORB/topics/test_uorb.h>
#include <px4_platform_common/log.h>
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/tasks.h>
#include <px4_platform_common/time.h>
#include <px4_platform_common/posix.h>
//#include <px4_platform_common/shutdown.h> // 包含就会报错
#include <px4_platform_common/defines.h>
static bool thread_should_exit = false; /**< daemon exit flag */
static bool thread_running = false; /**< daemon status flag */
static int px4_uorb_adver_task; /**< Handle of daemon task / thread */
/**
* daemon management function.
*/
__EXPORT int px4_uorb_adver_main(int argc, char *argv[]);
/**
* Mainloop of daemon.
*/
int px4_uorb_adver_thread_main(int argc, char *argv[]);
/**
* Print the correct usage.
*/
static void usage(const char *reason);
static void
usage(const char *reason)
{
if (reason) {
warnx("%s\n", reason);
}
warnx("usage: px4_uorb_adver {start|stop|status} [-p <additional params>]\n\n");
}
/**
消息发布进程,会不断的发送自定义的消息
**/
int px4_uorb_adver_main(int argc, char *argv[])
{
if (argc < 2) {
usage("missing command");
return 1;
}
if (!strcmp(argv[1], "start")) {
if (thread_running) {
warnx("daemon already running\n");
/* this is not an error */
return 0;
}
thread_should_exit = false;//定义一个守护进程
px4_uorb_adver_task = px4_task_spawn_cmd("px4_uorb_adver",
SCHED_DEFAULT,
SCHED_PRIORITY_DEFAULT,//调度优先级
2000,//堆栈分配大小
px4_uorb_adver_thread_main,
(argv) ? (char *const *)&argv[2] : (char *const *)NULL);
return 0;
}
if (!strcmp(argv[1], "stop")) {
thread_should_exit = true;
return 0;
}
if (!strcmp(argv[1], "status")) {
if (thread_running) {
warnx("\trunning\n");
} else {
warnx("\tnot started\n");
}
return 0;
}
usage("unrecognized command");
return 1;
}
int px4_uorb_adver_thread_main(int argc, char *argv[])
{
struct test_uorb_s test_uorb_ad; // 自定义消息的结构体
// 初始化数据 全零
memset(&test_uorb_ad, 0 , sizeof(test_uorb_ad));
// 公告主题
orb_advert_t test_pub = orb_advertise(ORB_ID(test_uorb), &test_uorb_ad);
warnx("[daemon] starting\n");
thread_running = true;
// 每隔1s 发布一次新的数据
while (!thread_should_exit) {
test_uorb_ad.test1 = 5;
test_uorb_ad.test2 = 6;
test_uorb_ad.test3 = 7;
orb_publish(ORB_ID(test_uorb), test_pub, &test_uorb_ad);
usleep(1000);
}
warnx("[daemon] exiting.\n");
thread_running = false;
return 0;
}
CMakeLists.txt文件编写:
############################################################################
#
# Copyright (c) 2015 PX4 Development Team. All rights reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions
# are met:
#
# 1. Redistributions of source code must retain the above copyright
# notice, this list of conditions and the following disclaimer.
# 2. Redistributions in binary form must reproduce the above copyright
# notice, this list of conditions and the following disclaimer in
# the documentation and/or other materials provided with the
# distribution.
# 3. Neither the name PX4 nor the names of its contributors may be
# used to endorse or promote products derived from this software
# without specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
# "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
# LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
# FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
# COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
# INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
# BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
# OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
# AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
# LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
# ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
# POSSIBILITY OF SUCH DAMAGE.
#
############################################################################
px4_add_module(
MODULE modules__px4_uorb_adver
MAIN px4_uorb_adver
STACK_MAIN 2000 #程序堆栈大小
SRCS
px4_uorb_adver.c
DEPENDS
)
# vim: set noet ft=cmake fenc=utf-8 ff=unix :
五、 编写订阅文件
.c文件编写:
/**
* @file px4_uorb_subs.c
*/
#include <stdio.h>
#include <termios.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
#include <stdbool.h>
#include <errno.h>
#include <drivers/drv_hrt.h>
#include <systemlib/err.h>
#include <fcntl.h>
#include <systemlib/mavlink_log.h>
#include <uORB/uORB.h>
#include <uORB/topics/test_uorb.h>
#include <px4_platform_common/log.h>
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/tasks.h>
#include <px4_platform_common/time.h>
#include <px4_platform_common/posix.h>
//#include <px4_platform_common/shutdown.h> // 包含就会报错
#include <px4_platform_common/defines.h>
static bool thread_should_exit = false; /**< px4_uorb_subs exit flag */
static bool thread_running = false; /**< px4_uorb_subs status flag */
static int px4_uorb_subs_task; /**< Handle of px4_uorb_subs task / thread */
/**
* daemon management function.
*/
__EXPORT int px4_uorb_subs_main(int argc, char *argv[]);
/**
* Mainloop of daemon.
*/
int px4_uorb_subs_thread_main(int argc, char *argv[]);
/**
* Print the correct usage.
*/
static void usage(const char *reason);
static void
usage(const char *reason)
{
if (reason) {
warnx("%s\n", reason);
}
warnx("usage: px4_uorb_adver {start|stop|status} [-p <additional params>]\n\n");
}
/**
消息发布进程,会不断的接收自定义消息
*/
int px4_uorb_subs_main(int argc, char *argv[])
{
if (argc < 2) {
usage("missing command");
return 1;
}
if (!strcmp(argv[1], "start")) {
if (thread_running) {
warnx("px4_uorb_subs already running\n");
/* this is not an error */
return 0;
}
thread_should_exit = false;//定义一个守护进程
px4_uorb_subs_task = px4_task_spawn_cmd("px4_uorb_subs",
SCHED_DEFAULT,
SCHED_PRIORITY_DEFAULT,//调度优先级
2000,//堆栈分配大小
px4_uorb_subs_thread_main,
(argv) ? (char *const *)&argv[2] : (char *const *)NULL);
return 0;
}
if (!strcmp(argv[1], "stop")) {
thread_should_exit = true;
return 0;
}
if (!strcmp(argv[1], "status")) {
if (thread_running) {
warnx("\trunning\n");
} else {
warnx("\tnot started\n");
}
return 0;
}
usage("unrecognized command");
return 1;
}
int px4_uorb_subs_thread_main(int argc, char *argv[])
{
warnx("[px4_uorb_subs] starting\n");
// 订阅主题
int test_sub_fd = orb_subscribe(ORB_ID(test_uorb));
// 初始化结构体
struct test_uorb_s test_uorb_sub;
// 初始化数据 全零
memset(&test_uorb_sub, 0 , sizeof(test_uorb_sub));
// 定义变量
int test1 = 0,test2 = 0,test3 = 0;
thread_running = true;
while (!thread_should_exit) {
warnx("Hello px4_uorb_subs!\n");
bool updated;
/* Check if vehicle control mode has changed */
// 检查是否更新
orb_check(test_sub_fd, &updated);
if (updated)
{
// copy数据
orb_copy(ORB_ID(test_uorb),test_sub_fd,&test_uorb_sub);
// 赋值到变量
test1 = test_uorb_sub.test1;
test2 = test_uorb_sub.test2;
test3 = test_uorb_sub.test3;
}
// 打印
warnx("test_uorb.test1 = %d, test_uorb.test2 = %d ,test_uorb.test3 = %d\n",test1,test2,test3);
usleep(500);
}
warnx("[px4_uorb_subs] exiting.\n");
thread_running = false;
return 0;
}CMakeLists.txt文件编写:
############################################################################
#
# Copyright (c) 2015 PX4 Development Team. All rights reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions
# are met:
#
# 1. Redistributions of source code must retain the above copyright
# notice, this list of conditions and the following disclaimer.
# 2. Redistributions in binary form must reproduce the above copyright
# notice, this list of conditions and the following disclaimer in
# the documentation and/or other materials provided with the
# distribution.
# 3. Neither the name PX4 nor the names of its contributors may be
# used to endorse or promote products derived from this software
# without specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
# "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
# LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
# FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
# COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
# INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
# BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
# OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
# AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
# LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
# ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
# POSSIBILITY OF SUCH DAMAGE.
#
############################################################################
px4_add_module(
MODULE modules__px4_uorb_subs
MAIN px4_uorb_subs
STACK_MAIN 2000 #程序堆栈大小
SRCS
px4_uorb_subs.c
DEPENDS
)
# vim: set noet ft=cmake fenc=utf-8 ff=unix :
六、测试
编写完之后就可以正常的进行调用然后测试效果了。
需要先运行发布脚本再运行订阅脚本才能有效果。

